Aktywujesz wyjścia (atmega) na silniki pinami PD7 i PB0. Obydwa na stan wysoki.
Teraz interesują Cię piny sterujące kierunkiem obrotu silników, w parach (atmega):
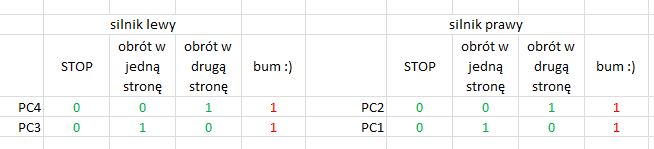
silnik lewy: PC3 i PC4
silnik prawy: PC1 i PC2


Jak płynnie zmieniać prędkość obrotową silników (miękki start/stop)?
Przy tym podłączeniu musisz zastosować programowy PWM:
Zakładamy, że kręcisz jednym silnikiem, w jedną stronę.
Stan wysoki na jednym z pinów (np. PC2) jest wysoki, więc silnik kręci się z max prędkością.
Teraz spójrz:

W krótkim okresie czasu ustawiasz stan wysoki, po chwili niski, i tak w kółko...
W sensie - migasz jak diodą, tylko zamiast diody masz cewkę silnika a po drodze jeszcze l298, ale to nie ma znaczenia

Logika jest taka sama.
Powiel to teraz 4x i będziesz sterował 4 kierunkami dwóch silników.
Może być tak, że przy małej wartości wypełnienia silnik w ogóle nie ruszy, bo wartość średnia prądu dla danego okresu będzie za niska, dlatego dla testów stosujcie wypełnienie >50/60%.
 Kanał - ATNEL tech-forum
Kanał - ATNEL tech-forum